


")












Pneumatyka, sprężarki, osuszacze, zbiorniki, instalacje pneumatyczne, stacje przygotowania powietrza, manometry, przewody pneumatyczne, zawory pneumatyczne, siłowniki pneumatyczne, armatura pneumatyczna.
Elementy zamieniające energię sprężonego powietrza na energię mechaniczną - siłowniki pneumatyczne
1. Informacej podstawowe
Siłowniki pneumatyczne są to elementy pneumatyczne zamieniające energię sprężonego powietrza na energię mechaniczną (siłę lub moment obrotowy) i w układach pneumatycznych stanowią grupę elementów wykonawczych i bardzo często są stosowane w napędach maszyn, urządzeń oraz w sterowaniach układami automatyki i procesów technologicznych.

Ze względu na charakter ruchu elementu roboczego (tłoczyska siłownika lub wałka)siłowniki dzieli się na:
- siłowniki o ruchu posuwisto zwrotnym tłoczyska
- siłowniki o ruchu obrotowym wałka
W grupie siłowników o ruchu posuwisto zwrotnych występują następujące ich odmiany:
- siłowniki tłokowe
- siłowniki nurnikowe
- siłowniki membranowe
- siłowniki workowe (dętkowe)
W grupie siłowników o ruchu obrotowym występują następujące odmiany:
- siłowniki wahadłowe (realizujące ruch w zakresie 90°-360°
- siłowniki obrotowe (silniki pneumatyczne)
- siłowniki jednostronnego działania
- siłowniki dwustronnego działania
Schematy przedstawione na kolejnej stronie ilustrują odmiany najbardziej typowych siłowników pneumatycznych oraz ich schematy graficzne. Na rysunkach technicznych układów pneumatycznych dopuszcza się stosowanie zarówno schematów szczegółowych jak i uproszczonych
| L.P. | Schemat | Opis |
| 1 | Siłownik pneumatyczny jednostronnego działania pchający | |
| 2 | Siłownik jednostronnego działania ciągnący ze sprężyną | |
| 3 | Siłownik pneumatyczny dwustronnego działania z dwustronnym tłoczyskiem, z hamowaniem dwustronnie nastawialnym | |
| 4 | Siłownik pneumatyczny dwustronnego działania z dwustronnym tłoczyskiem, z hamowaniem dwustronnie nastawialnym, z bezstykową sygnalizacją położenia tłoka | |
| 5 | Siłownik pneumatyczny dwustronnego działania z dwustronnym tłoczyskiem | |
| 6 | Siłownik pneumatyczny dwustronnego działania z dwustronnym wydrążonym tłoczyskiem i tłokiem | |
| 7 | Beztłoczyskowy siłownik pneumatyczny ze sprzężeniem mechanicznym, z hamowaniem dwustronnym nastawialnym, z bezstykową sygnalizacją położenia tłoka | |
| 8 | Siłownik pneumatyczny czteropołożeniowy i bezstykową sygnalizacją tłoka | |
| 9 | Siłownik pneumatyczny „tandem” dwustronnego działania z jednostronnym tłoczyskiem i bezstykową sygnalizacją położenia tłoka |
2. Charakterystyki typowych siłowników pneumatycznych tłokowych
2.1 Siłowniki pneumatyczne dwustronnego działania
Siłowniki pneumatyczne o konstrukcji tłokowej, w których elementem ruchomym jest tłoczysko. Ruch tłoczyska w obydwie strony odbywa się energią sprężonego powietrza doprowadzaną naprzemiennie do komór siłownika.
Najbardziej typowa i rozpowszechniona grupa elementów wykonawczych. Siłownik może być wyposażony w jedno tłoczysko (siłowniki z jednostronnym tłoczyskiem) lub dwa (siłowniki z dwustronnym tłoczyskiem). Podstawowym parametrem siłownika jest jego siła działania. Siła działania siłownika dwustronnego działania zależy od jego średnicy nominalnej (D) oraz ciśnienia zasilania. Ze względu na różnice powierzchni czynnej, nad i pod tłokiem,na którą działa ciśnienie zasilania poniżej podano wzory do obliczeń tzw. siły pchającej i ciągnącej siłownika pneumatycznego dwustronnego działania. Siły te różnią się od siebie.
Użyteczna siła z jaką działa siłownik dwustronnego działania obliczana jest z następujących równań:
- dla siłownika dwustronnego działania z jednostronnym tłoczyskiem
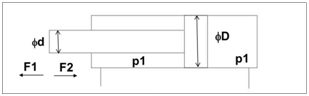
- p1 – ciśnienie zasilania [bar]
- D –średnica nominalna (tłoka) [cm]
- d – średnica tłoczyska [cm]
- Siła pchająca siłownika F1: F1=Π x D2/4 x p1 [kG]
- Siła ciągnąca siłownika F2: F2=Π x (D2-d2)/4 x p1 [kG]
- Siła pchająca dla siłownika z jednostronnym tłoczyskiem jest większa od siły ciągnącej
- dla siłownika dwustronnego działania z dwustronnym tłoczyskiem
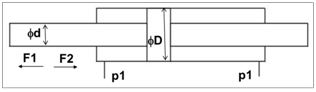
- p1 – ciśnienie zasilania [bar]
- D –średnica nominalna (tłoka) [cm]
- d – średnica tłoczyska [cm]
- Siła pchająca i ciągnąca siłownika pneumatycznego są równe i obliczane są zgodnie ze wzorem: F1(F2)= Π x(D2-d2)/4 x p1 [kG]
2.2 Konstrukcja siłowników dwustronnego działania
Budowa siłownika pneumatycznego omówiona zostanie na podstawie siłownika znormalizowanego zgodnego ze standardami ISO 6431 oraz VDMA 24562
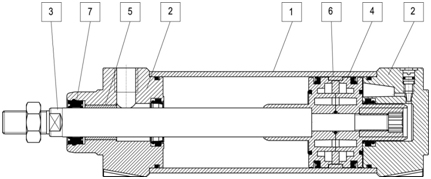
Typowy siłownik pneumatyczny dwustronnego działania zbudowany jest z następujących elementów konstrukcyjnych:
1 - Tuleja siłownika
2 - Pokrywy siłownika (przednia i tylna)
3 - Tłoczysko siłownika
4 - Tłok z uszczelnieniami i magnesem
5 - Tuleja prowadząca tłoczysko
6 - Pierścień prowadzący tłoka
7 - Uszczelka tłoczyska.
Podstawowe parametry techniczne opisujące siłowniki pneumatyczne:
- średnica siłownika pneumatycznego: od 8 mm do 320 mm (większe średnice traktowane są jako nietypowe)
- zakres skoków roboczych od 1mm do ok. 3000 mm (ze względu na dostępność tulei)
- siły użyteczne przy zasilaniu standardowym ciśnieniem 0,63MPa od 5 daN do 5000 daN
- zakres ciśnień pracy od 0,05 MPa do 1,6 MPa
- zakres temperatur pracy od -20 do +180oC (w zależności od zastosowanych uszczelnień)
- czynnik roboczy - sprężone powietrze oczyszczone do wartości min. 40 μm, smarowane mgłą olejową lub powietrze oczyszczone niesmarowane (wymaga dokładniejszej filtracji ok 20 μm)
Ze względu na zastosowanie siłowników pneumatycznych w układach automatyki w których wymagane jest potwierdzenie wykonana cyklu roboczego siłownika stosowane są napędy wyposażone w magnes zabudowany w tłoku. Umożliwia to stosowanie bezstykowych czujników położenia tłoka. Są to elementy wykorzystujące pole magnetyczne do generowania sygnałów elektrycznych stanowiących informacje o stanie obiektu w układach sterowania i regulacji. Stosowane są czujniki kontaktronowe lub elektroniczne (półprzewodnikowe) zamontowane bezpośrednio w tulei kształtowej siłownika lub z wykorzystaniem odpowiednich uchwytów mocujących. Ten rodzaj sygnalizacji nazywany jest bezdotykową sygnalizacją położenia tłoka.
Istnieją też rozwiązania, gdzie do sygnalizacji a w szczególności do potwierdzenia wykonania cyklu roboczego stosuje się czujniki indukcyjne.
Ze względu na różne środowiska pracy siłowników pneumatycznych, charakter obciążeń i miejsce zabudowy są one wykonywane z wykorzystaniem różnych materiałów. Do typowych odmian siłowników pneumatycznych zalicza się:
● Siłowniki w wykonaniu ze stali nierdzewnych i kwasoodpornych
Siłowniki pracujące w szczególnie ciężkich warunkach środowiska narażone na kontakt z substancjami żrącymi, wodą słodką i morską, środkami i produktami spożywczymi, pracujące w atmosferze wybuchowej. Podstawowe branże przemysłu stosujące tego typu siłowniki to: przemysł spożywczy, przemysł chemiczny i farmaceutyczny, urządzenia pracujące na jednostkach pływających i w lotnictwie, przemysł zbrojeniowy.
Siłowniki mogą być w całości wykonywane z materiałów nierdzewnych lub kwasoodpornych. Ze względów ekonomicznych często tylko niektóre najbardziej narażone na szkodliwe warunki części siłowników wykonane są ze stali jakościowych (tłoczyska, tuleje, śruby ściągające, nakrętki)
● Siłowniki w wykonaniu tworzywowym
Warunki identyczne do wymienionych powyżej, najczęściej z tworzywa wykonuje się tuleje i pokrywy siłowników
● Siłowniki do pracy w niskich lub wysokich temperaturach
W tego odmianach siłowników stosuje się specjalne uszczelnienia mogące wytrzymać bardzo niskie lub wysokie temperatury otoczenia w tym również ekstremalne warunki klimatyczne. Najpowszechniej wykorzystywanym materiałem na uszczelnienia jest Viton (rodzaj gumy syntetycznej) oraz teflon. Podstawowe branże przemysłu stosujące tego typu siłowniki to: przemysł spożywczy (chłodnie), kriogenika, hutnictwo żelaza i metali kolorowych, obróbka cieplna i powierzchniowa metali, odlewnictwo, kolejnictwo, pojazdy wojskowe, pojazdy do budowy dróg, wytwórnie mas bitumicznych.
● Siłowniki ze stalowymi pokrywami i tulejami Siłowniki te są przeznaczone do szczególnie trudnych warunków pracy, gdzie występuje ryzyko mechanicznego uszkodzenia napędu, siłowniki pracujące w zapyleniu i w atmosferze wybuchowej. Są stosowane w górnictwie węgla gazu i ropy naftowej, platformach wiertniczych, hutach, maszynach budowlanych i drogowych
● Siłowniki specjalne i nietypowe
Rodzaj napędów pneumatycznych dedykowanych do konkretnych rozwiązań maszyn i urządzeń. Siłowniki tego rodzaju są produkowane dla konkretnych odbiorców mających nietypowe wymagania dotyczące wymiarów gabarytowych, rozwiązań konstrukcyjnych, zastosowanych uszczelnień lub siłownik wyposażony jest w dodatkowy osprzęt zewnętrzny np. zawory rozdzielające, zawory do regulacji prędkości ruchu tłoczyska itp. Amortyzacja pneumatyczna
Siłowniki pneumatyczne charakteryzują się dużymi prędkościami ruchu tłoczyska. Przekłada się to na dużą energię kinetyczną, co może powodować bezpośredni kontakt powierzchni tłoka z pokrywą. W celu ochrony elementów wewnętrznych siłowniki wyposaża się w amortyzację pneumatyczną działającą na zasadzie poduszki powietrznej wytwarzanej pomiędzy powierzchniami tłoka i pokryw. Amortyzacja pneumatyczna jest regulowana zaworem dławiącym, co pozwala na jest dopasowanie do charakteru pracy siłownika.
2.3 Siłowniki pneumatyczne jednostronnego działania
Siłowniki jednostronnego działania wykonuję ruch roboczy poprzez podanie ciśnienia do komory roboczej, ruch powrotny siłownika jest wykonywany siłami zewnętrznymi. Siły te pochodzą zwykle od zamontowanych sprężyn. W siłownikach jednostronnego działania ruch powrotny może wywoływać także siła pochodząca od ciężaru zamontowanego obciążenia.
2.4 Siłowniki znormalizowane
Siłowniki pneumatyczne jako jedna z nielicznych grup elementów pneumatyki posiada szereg norm dotyczących ich wymiarów gabarytowych. Obecnie powszechnie stosowane są siłowniki znormalizowane, które pozwalają na pełną zamienność napędów pochodzących od różnych producentów.
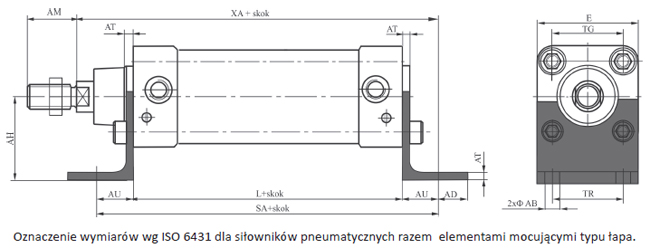
Jednymi z pierwszych norm dla siłowników pneumatycznych rozpowszechnionych na świecie stały się normy ISO6431 i ISO6432. Normy te obejmują nie tylko wymiary gabarytowe siłowników o średnicach od 8 mm do 320 mm, lecz również wymiary siłownika razem z elementem mocującymi.
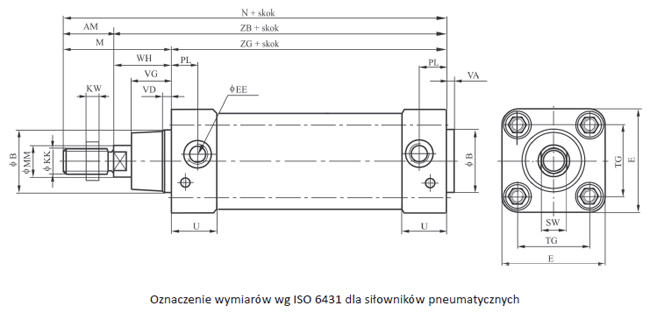
Poniżej podano przykładowy rysunek z wymiarami wg. Normy ISO 6431. Oznaczenia literowe wymiarów są uniwersalne i stosowane przez producentów siłowników pneumatycznych w katalogach. Normy te aktualnie zostały zastąpione normą ISO 15552 która obejmuje również wykonania siłowników z tuleją profilową z kanałkami dla czujników położenia tłoka.
DZIAŁ PROJEKTOWY

Podstawy pneumatyki

Rzetelna firma

Ogólne warunki handlowe

O FIRMIE
Pomagier-Trzebuchowscy
sp. z o.o.
ul. Marii Skłodowskiej-Curie 97
87-100 Toruń
NIP 556-22-23-819
Regon 092307860
KRS 0000903675
BDO 000112099
Sąd Rejonowy w Toruniu
VII Wydział Gospodarczy Krajowego Rejestru Sądowego
Kapitał zakładowy: 815.200,00 zł
Konto Santander Bank Polska SA
79 10901069 0000 0000 0704 8941
Konto Bank ING Bank Śląski
64 10501139 1000 0023 4975 0618
CSP
Fundusz Europejski

Znajdź handlowca
Wyszukaj po powiecie lub kodzie pocztowym
xAktualności
Staliśmy się częścią Grupy Rubix
Wybierz oddział
Hafner w czasie pandemii

Generatory azotu

FILMY

Siłowniki dla hutnictwa
CSP

PRODUKCJA SIŁOWNIKÓW

Zamów katalog
